交易价格: 面议
类型: 专利
技术成熟度: 已有样品
专利所属地:DE德国
专利号:102013005522
交易方式: 完全转让 许可转让 技术入股
联系人: 冯燕
所在地:海外地区海外地区
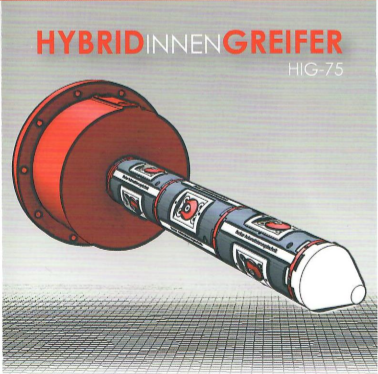
机器人内推式码垛机械手。
项目简介:
机器人机械手抓举过程中,机械臂末端的夹具是直接和物体接触的部分,该抓举方式及内部设计直接影响到抓举速度,同时对于减低误差、避免物体损伤起决定性作用。市面上现有的抓手多数为外着力外抓型,和物体接触部分有直接抓举点,因此存在着力点的直接压力,造成抓举误差甚至被抓物体损伤等弊病。
项目核心创新点:
该专利专门针对卷筒式物体码垛设计了内推式抓手,结合液压和气动方式,着力均匀,不接触被抓物体表面,以实现无点压,无创痕的安全准确抓举方式。
项目详细用途:
动力方式:结合液压&气动
抓举方式:内推
抓举重量上限:100公斤/模块, 可实现3个模块
产品规格:75mm
模块:160mm
净重:23,2公斤
跨度对接行程:75-91 mm
跨度物理力度:2650 牛顿
实用领域:薄膜卷、钢卷、纸卷、商标卷等卷筒抓举码垛
配套机器人:适用于市面主流机器人例如库卡, ABB, 三菱等
项目特点:
结合液压和气动的优势
兼容的模块化设计
实现内部推动固定设计避免抓举不当或用力不均而造成的物件损伤
通过全新的内部连接装置实现灵活的抓举功能
紧凑的设计实现强大的功能
成果推荐 需求推荐 评估专家推荐 评估机构推荐
Copyright © 2018 宁夏回族自治区生产力促进中心 版权所有 宁ICP备11000235号-3 宁公网安备 64010402000776号
网站访问量: 网站在线人数:0 技术支持:科易网 
 微信公众号
微信公众号